
יחסי הגומלין בין תנועת התחבורה הציבורית המועדפת לתנועת הולכי הרגל בצמתים מרומזרים עירוניים - חלק ב'
פרופ"ח שלמה בכור | פרופ"ח תומר טולדו - פקולטה להנדסה אזרחית, טכניון - מוסד טכנולוגי לישראל
1. הקדמה
מאמר זה מציג מקרה בוחן (case study) פרטני שבו נבחנו יחסי הגומלין בצומת מרומזר קיים ומתפקד בחיפה עם מע' העדפה לתחבורה ציבורית.
הכלי שנבחר לצורך מקרה הבוחן הוא כלי סימולציה שנקרא MESCOP) Mesoscopic Evaluation of Signal COntrol Plans) . זהו כלי סימולציה מבוסס מודל מיזוסקופי משולב עם אלגוריתמים גנטי (GA) אשר פותח בטכניון במסגרת עבודת הדוקטורט של דר' תמיר בלשה ובהנחייתו של פרופ'ח תומר טולדו (Balasha & Toledo 2015). תהליך האופטימיזציה נועד למציאת הפרמטרים המיטביים ביותר לשימוש בתכנית הרמזור (כתלות בקלט) ולאחר מכן נעשה שימוש בסימולציה מבוססת מודל מזוסקופי ברמת פירוט אשר כוללת ייצוג תכניות הרמזור, מיקום הגלאים ונתוני הגיאומטריה של הצומת הנבחן, כאשר פרמטרים אחרים נמצאו כלא משפיעים או חשובים לקביעת זמני העיכוב בצומת. המודל מתייחס לרכבים פרטים, תח"צ וכן הולכי רגל ולכן נמצא מתאים על מנת לבחון את יחסי הגומלין בו נדון נושא מאמר זה.
2. רקע
הצומת שנבחר לצורך מקרה בוחן הינו צומת מרומזר בחיפה בין הרחובות שער פלמר, וכיאט לדרך העצמאות (איור 1). הצומת הינו צומת מופעל תנועה עם העדפה לתחבורה ציבורית ומנגנון פיצוי וגלישת תור.
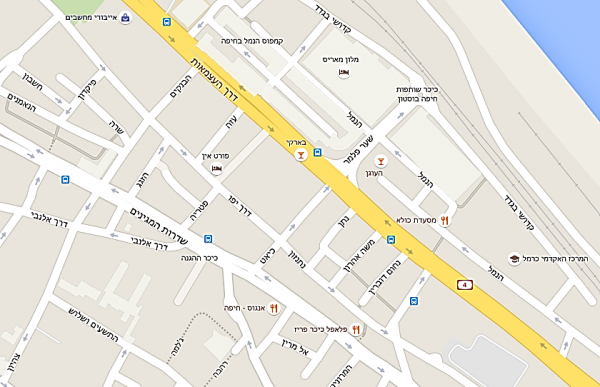
איור 1: מיקום מקרה הבוחן

איור 2: מפת קווי המטרונית בחיפה
דרך העצמאות משמשת כעורק תחבורתי מרכזי בעיר התחתית בחיפה, כאשר הוא מחבר בין פאתי העיר במחלף הקריות (צ'ק פוסט) דרך איזור הנמל והמושבה הגרמנית, עוקף את רכס הכרמל מצפון עד לחיבור עם דרך יפו ושד' ההגנה באיזור בת גלים. הציר ממשיך למעשה עד החיבור עם מרכז התעסוקה המרכזי של חיפה, מת"מ . קווי התחבורה הציבורית המועדפת של חיפה מסוג BRT- המטרונית- 1 ו-2 חולפים על פני ציר העצמאות בתדירויות שנעה עד 4 דק' לכיוון, כאשר בשעות השיא יוצאים שתי רכבי מטרונית יחדיו.
רח' כיאט הינו רח' מאסף אשר קולט את התנועה המגיעה מכיוון הדר הכרמל ומחבר אותה לעורק דרך העצמאות. בחיבור לדרך העצמאות הכיוון הינו חד-סטרי, כלומר ישנה רק יציאה לכיוון צפון אך אין תנועה לכיוון דרום מרח' העצמאות לכיוון דרך העצמאות.
רח' שער פלמר, כשמו כן הוא, משמש כשער הכניסה לנמל חיפה וקמפוס הנמל לסטודנטים הלומדים במוסדות האקדמאיים ברחבי העיר התחתית. הרח' הינו דו סטרי.
ההעדפה במטרונית של חיפה הינה מסוג אקטיבי, חלקית, לא מותנית. מערכת של גלאי קרבה אלקטרומגנטי השראתיים מזהים את התקרבותו של רכב המטרונית לצומת המרומזר ומעדכנים את זמני הרמזור כך שזמני העיכוב של רכב המטרונית בצמתים פוחתים בצורה משמעותית. במע' ההעדפה של רכב המטרונית אין התייחסות למס' הנוסעים העולים על רכב המטרונית וכן אין התייחסות דינמית לעומסי התנועה בכיוונים המשניים. עם זאת, קיים מנגנון פיצוי אשר כשמו כן הוא, מפצה את הכיוונים המשניים ובודק שהתקבל מספיק זמן ירוק בכיוונים המשניים לאורך מס' מסוים של מחזורי רמזור (שנקבע מראש). במע' ההעדפה של רכבי המטרונית אין התייחסות להפרש בין הזמן שרכב התצ"מ היה צריך להגיע לצומת לעומת הזמן שבו הוא הגיע בפועל- כלומר אין וויסות של מערכת הזמנים של הקו ואמינות הקו נגזרת בעיקר מצמצום זמני העיכוב הלא צפויים. מע' הנתיבים במתע"ן המטרונית היא ברובה מסוג נת"צ שמאלי, אך ישנם מקומות בהם ישנם נת"צ ימיני (שדרות ההגנה), נת"צ בניגוד לכיוון התנועה (שכונת הדר) וכן איזורים בהם אף ישנה תנועה משותפת עם שאר כלי הרכב ככורח המציאות.
2.1 גיאומטריה ופריסת הגלאים בצומת
הצומת כולל שמונה תנועות כלי רכב: שני קווי תחבורה תצ"מ ושישה תנועות כלי רכב פרטיים.
באיור 3 ניתן לראות את התרשים הגיאומטרי בצומת עבור מקרה הבוחן. הציר הראשי בצומת הינו דרך העצמאות, בציר זה נע התצ"מ בנתיב בלעדי (מסומן במסלול אדום) מסוג נת"צ שמאלי, והוא כולל את תנועות 2 ו-6. תנועות 7 ו-3 הינם הכיוונים הראשיים עבור כלי הרכב פרטיים וכן תחבורה ציבורית רגילה (אוטובוסים 'רגילים' ומוניות שירות). תנועות 1,3,4,5,8 משמשות עבור הכיוונים המשניים לכלי הרכב הפרטי וכן תחבורה ציבורית 'רגילה' שאינה מועדפת. מלבד תנועות הרכבים המנועיים ישנם חמישה מעברי חצייה מרומזרים מופעלי לחצן הולכי רגל (ס-11) עבור הולכי הרגל ועוד שניים נוספים לא מרומזרים (. אין בצומת התייחסות לתנועות האופניים ולכן לפי תקנות התעבורה (תשכ"א 1961) הם נעים במשותף עם כלי הרכב בנתיבי הרכב המנועי (אך לא בנת"צ).
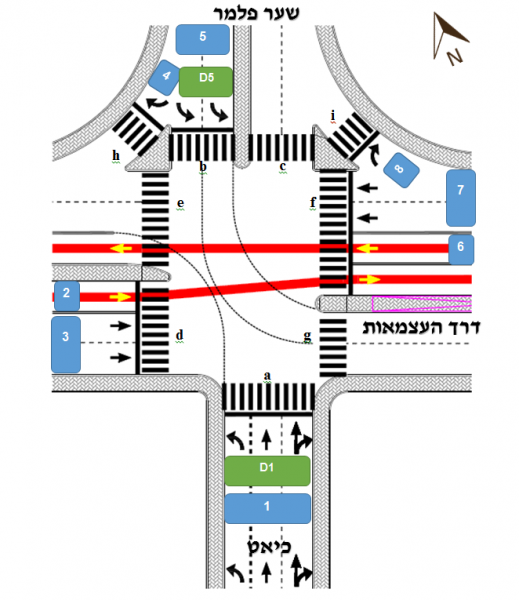
איור 3: תרשים הצומת עבור מקרה הבוחן
תחנת מטרונית ממוקמת בגישה המזרחית מספר מטרים לאחר הצומת והיא משרתת את תנועת התצ"מ שנע בתנועה 2 ממערב למזרח. התחנה עבור תנועה 6 (ממזרח למערב) ממוקמת בצומת ברח' אליהו, כ-200 מ' מזרחית לצומת.
רוחב הנתיבים הינו 3.5 מ' לכל נתיב לרכב ממונע רגיל ו-3.6 מ' עבור התצ"מ (משיקולים תפעוליים ותנועתיים).
הצומת הינו מופעל תנועה באופן מלא. גלאי נוכחות ממוקמים בגישות המשניות והם משמים עבור זיהוי דרישה, הארכה ותור. גלאי הביקוש ממוקמים בסמוך לקו העצירה. גלאי הארכה ממוקמים כ-12 מ' במעלה הצומת (מיקום גלאי הארכה תלוי בפער החילוף ופרמטרים נוספים). קיימים גלאים נוספים עבור התצ"מ בגישה המזרחית והמערבית, אלה נועדו כדי לזהות את הגעתם התצ"מ בזמן ההגעה המשוער. מערכת הגלאים מסונכרנת עם תכנית הזמנים על מנת לספק העדפה לרכב התצ"מ. בנוסף לגלאי הקרבה במעלה הצומת ישנם גלאי עזיבה (checkout) במורד הזרם המספקים מידע למערכת כי רכב התצ"מ עבר את הצומת.
זרימות התנועה בצומת עבור הרצת הסימולציה הובאו מתוך ספירות תנועה אמתיות אשר נערכו בצומת ועדכנו על ידי מודל הצבה תנועתי.
טבלה 1: זרימות התנועה בצומת
|
תנועה |
1L |
1T |
1R |
2T |
3T |
4R |
5L |
6T |
7T |
8R |
|
זרימת התנועה (יר"מ) |
115 |
144 |
45 |
30 |
1058 |
36 |
59 |
30 |
1713 |
65 |
2.2 עקרונות הלוגיקה בצומת ותרשים התמונות
מערך התנועות בצומת מסודר בשלוש תמונות (מסומנות A,B,C) אשר מוצגות באיור 4.
תמונה A היא התמונה הראשית בא נע רכב התצ"מ (תנועות 2 ו-6) ושאר כלי הרכב (תנועות 7 ו-3) בדרך העצמאות. תמונות Bו-C מספקות אור ירוק לתנועות בכיוונים המשניים ברח' כיאט (תנועה 1) וברח' שער פלמר (תנועה 5). תמונה B מופעלת רק כאשר ישנו ביקוש לרכב לתנועה 5 ע"י גלאי D5 או כאשר הולך רגל לוחץ על לחצן הולכי הרגל בסמוך למעברי חצייה fו/או g (על מנת למנוע מצב שהולך רגל יהיה תלוי בהגעת כלי רכב המגיעים מרח' כיאט). תמונה C מופעלת רק כאשר ישנה נוכחות כלי רכב בתנועה 5 או כאשר לחצן הולך רגל בסמוך למעברי חצייה eו/או d (על מנת למנוע מצב שהולך רגל יהיה תלוי בהגעת כלי רכב רח' שער פלמר). כאשר רכב התצ"מ מגיע לצומת ובצומת פעילה תמונה B, מע' הבקרה בוחנת את הדרך לקיצור זמן הירוק על מנת לספק העדפה לרכב התצ"מ. קיצור זמן הירוק לתמונה B, אינו פעיל כאשר גלאי התור בתנועה 1 פעיל (על מנת למנוע מצבי גלישת 'תור' לצומת הדרומי (צומת כיאט/נתנזון/דרך יפו). לאחר סיום הזמן הירוק לתמונה B שאר הזמן הירוק מועבר לתמונה A עד להשלמת זמן המחזור. בתמונה B מופעל מנגנון פיצוי. באופן דומה מתוכננת הלוגיקה לתמונה C.
פירוט מלא על הלוגיקה, מערך לוגיקת הבקרה כוללת 14 פרמטרים:
|
# |
שם פרמטר |
סימון |
|
1. |
זמן ירוק מרבי לתמונה A |
min_A |
|
2. |
זמן ירוק מרבי לתמונה A |
max_A |
|
3. |
זמן ירוק מזערי לתמונה B |
min_B |
|
4. |
זמן ירוק מרבי לתמונה B |
max_B |
|
5. |
זמן ירוק מזערי לתמונה C |
min_C |
|
6. |
זמן ירוק מרבי לתמונה C |
max_C |
|
7. |
זמן ירוק מקדים |
early_green |
|
8. |
זמן עיכוב מרבי בתור |
max_queue_time |
|
9. |
אורך תור מרבי |
max_queue_length |
|
10. |
זמן אדום מרבי להולכי הרגל במעברי החצייה |
max_ped_red |
|
11. |
זמן ירוק מזערי לתמונה Bלאורך מספר מחזורים מסוים |
req_cum_duration |
|
12. |
צבירת מס' מחזורים עד להפעלת מנגנון הפיצוי |
cum_num_of_cycl |
|
13. |
פער קריטי מזערי |
min_gap |
|
14. |
אורך זמן מחזור |
cycle_length |
נתונים אלו משמשים כקלט עבור הליך האופטימזציה (שימוש באלגוריתמים גנטי) במהלכו מאותרים הערכים האופטימליים לטובת צמצום זמני העיכוב המיוצגים בפונקציית המטרה של המזוסימולציה.
הסבר על לוגיקת הבקרה ונתונים נוספים ניתן למצוא בעבודת הדוקטורט של דר' תמיר בלשה (Balasha & Toledo 2015).
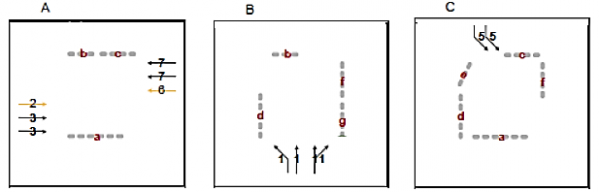
איור 4: תרשים התמונות בצומת (Balasha & Toledo 2015)
2.3 הנחות המודל
ניתן לראות כי MESCOP משתמש בהנחות הקשורות לזמני הנסיעה החזויים, קיבולת זרימת התנועה ומספר הנוסעים (טבלה 2).
זמני הנסיעה של רכב תצ"מ תלויות ביכולות המנועיות של הרכב שמתבטאות ביכולת האצה והאטה וכן קשורות לנושאים גיאומטריה (בעיקר רוחב הנתיב ומרחק בין תחנות). זמן הגעה המסתמך על מהירות של 20 קמ"ש הינו סביר בהתאם לתצפיות שנערכו במקום. זמני הנסיעה של שאר כלי הרכב תלויות גם הם ביכולות של כלי הרכב להאיץ ולהאט וכמובן שאלה גבוהות יותר מאשר רכב התצ"מ הכבד.
קצב השחרור של כלי הרכב הוא נתון דטרמיניסטי בהתאם לקיבולת התנועה. נתון זה התקבל על סמך תצפיות רבות שנערכו בארץ וברחבי העולם. קצר שחרור של רכב התצ"מ מתבסס על תדירות קווי המטרונית הקיימים בחיפה (כל 2 דק' חולף רכב תצ"מ).
מספר הנוסעים ברכב התצ"מ הונח שרירותית 50 נוסעים (על סמך מס' המושבים במטרונית) ומספר הנוסעים בשאר כלי הרכב מתבסס על מילוי של נוסע אחד לרכב, כפי שנצפה בסקרים רבים בארץ.
טבלה 2: הנחות לגבי כלי הרכב ותנועות הולכי הרגל (Balasha & Toledo 2015)
|
משתמש הדרך |
הליך הגעה |
זמן נסיעה |
קצב שחרור (discharging) [יר"מ/נתיב] |
מספר נוסעים |
|
רכב תצ"מ |
אקספוננציאלי שלילי |
התפלגות נורמלית (זמן הגעה 20 קמ"ש וסטיית תקן 5+- קמ"ש |
900 |
50 |
|
רכב לא תצ"מ |
התפלגות פואסון |
3 שניות (תנועות 1 ו-5) |
1800 |
1 |
|
הולכי רגל |
התפלגות פואסון |
3 שנית למעבר כל נתיב (לפי מהירות של 1.2 מ'/שנייה לכל הולך רגל) |
- |
1 |
2.4 מתודולוגיה
המתודולוגיה של מקרה הבוחן מתבססת על המתודולוגיה העקרונית של MESCOP (איור 5)
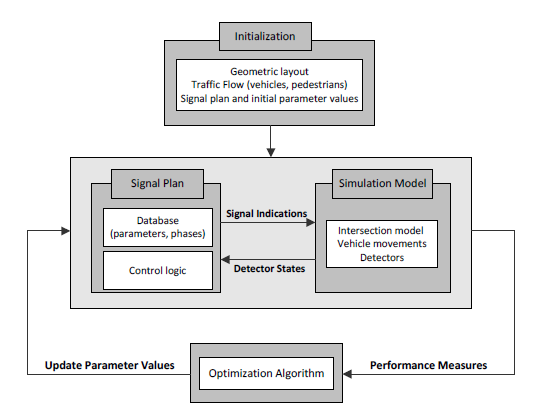
איור 5: סימולציה משולבת על בסיס אופטימיזציה- מבנה כללי (Balasha & Toledo 2015)
מערך הסימולציה מבוססת האופטימיזציה מכילה שלושה רכיבים עיקריים אשר נמצאים באינטראקציה זה עם זה: מודל סימולציה תנועה, מערכת בקרת אותות רמזור ואלגוריתם אופטימיזציה (Balasha & Toledo 2015).
מודל הסימולציה התנועתי מייצג את התנועה של משתמשי הדרך בצומת: כלי רכב פרטי, תח"צ והולכי רגל. מודל זה מייצג את המאפיינים של הצומת כמו תנוחה גיאומטרית, גלאי כלי רכב והולכי רגל. מודל התנועה מחובר למערך בקרת אותות רמזור והתנועות נעות בצומת בהתאם לגילוי המתרחש על גבי הגלאים.(Balasha & Toledo 2015).
מתוך מצאי הסימולציה נאמדים מדדי הביצוע ואלה מוכנסים כקלט לאלגוריתם אופטימיזציה. ב-MESCOP הוחלט להשתמש באלגוריתם מסוג אלגוריתם גנטי (GA) משיקולים המפורט בעבודת הדוקטורט.
התהליך כולו הינו תהליך חזרתי (iterative) בו מופעלת המתודולוגיה המוצגת באיור 5עד אשר מתקבלת התוצאה האופטימלית ובהתאם להגדרות שהוזמנו לאלגוריתמים לגבי זמן הרצה ומספר חזרות.
מידע נוסף לגבי מתודולוגיית MESCOP ניתן למצוא בעבודת הדוקטורט של דר' תמיר בלשה (Balasha & Toledo 2015).
2.5 תרחישים
טבלה 3 מסכמת את התרחישים שנבחנו במסגרת מקרה הבוחן, סך הכל בוצעו 10 תרחישים שונים.
החלק היחסי של מספר הולכי הרגל מתוך סך משתמשי הדרך (PP) חושב ע"י חילוק של מספר הולכי הרגל המגיעים לצומת בסכום של הכפלת זרימת תנועה כלי הרכב במקדם המילוי (1) עם הכפלת מס' רכב התצ"מ הנכנסים לצומת במקדם מילוי תצ"מ (50 לרכב תצ"מ) ומס' הולכי הרגל שמגיעים לצומת.
בפרמטר PP נבחן גם נושא החצייה הרציפה ע"י תרחיש עם חצייה וללא חצייה רציפה על מנת לבחון את השפעת החצייה הרציפה על זמני העיכוב של משתמשי הדרך. חצייה רציפה מוגדרת כרציפות של אור ירוק להולך הרגל אשר מאפשרת לו לחצות את הצומת מצד לצד ללא המתנה במפרדה.
אופן אכיפת החצייה הרציפה תתבצע ע"י הגבלת הגבול התחתון (lower bound) של זמני הירוק המזעריים בתנועות המשניות של אלגוריתם האופטימיזציה. זמן הירוק המזערי מתבסס על מס' הנתיבים אותו נדרש הולך הרגל לחצות כדי לבצע חצייה רציפה (3.5-3.6 מ' לנתיב) וכן על מהירות הליכה של 1.2 מ'/שנייה להולך רגל ( בהתאם להנחיות לתכנון רמזורים (1981))
טבלה 3: רשימת תרחישים עבור מקרה בוחן
|
שם פרמטר |
הסבר |
יחידה |
תרחישים עם חצייה רציפה |
תרחישים ללא חצייה רציפה |
|
Pedestrian Proportion) PP) |
החלק היחסי של מספר הולכי הרגל מתוך סך משתמשי הדרך בצומת. |
[-] |
0.1; 0.2; 0.4; 0.6; 0.8 |
0.1; 0.2; 0.4; 0.6; 0.8 |
3. תוצאות
3.1 זמני עיכוב למשתמשי הדרך
בתרשים 1 ניתן לראות כי זמני העיכוב בצומת לרכב התצ"מ והולכי הרגל, מושפעים בצורה משמעותית מחלקם היחסי של הולכי הרגל מסך משתמשי הדרך (PP). כאשר PP הינו נמוך יחסית (0.1-0.2) אין השפעה ממשית על החצייה הרציפה בצומת. אולם כאשר PP מעל ל-0.5 ניתן לראות כי החצייה הרציפה מוסיפה לזמני העיכוב של רכב התצ"מ בצורה משמעותית, אך יותר מכך, היא מוסיפה גם לזמני העיכוב של הולכי הרגל בצומת בשיעור של עד 20%. ניתן להסביר תוצאות אלו בכך שזמני המחזור נדרשים להתארך כתוצאה מהצורך בחצייה רציפה (זמן ירוק מזערי לתמונות המשניות לצורך חציית הולכי הרגל). מכיוון שזמן המחזור הינו פרמטר שמשפיע יותר על זמני העיכוב מאשר החצייה הרציפה, נוצר מצב שהחצייה הרציפה לא מפחיתה את זמני העיכוב של הולכי הרגל אלא להפך.
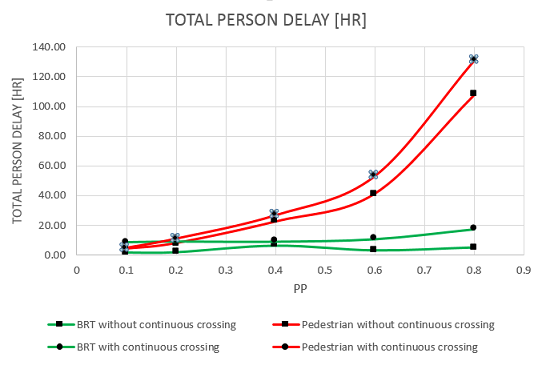
תרשים 1: זמני העיכוב המצטברים לתצ"מ ולהולכי הרגל עם חצייה רציפה וללא חצייה רציפה כתלות לחלק היחסי של מספר הולכי הרגל מתוך סך משתמשי הדרך בצומת
3.1.1 זמן מחזור אופטימלי למשתמשי הדרך ביחס ל-PP
בתרשים 2 מוצג זמן המחזור האופטימלי ביחס לפרמטר PP. ניתן לראות כי ככל שפרמטר PP גדל כך זמני המחזור האופטימליים המתקבלים הינם קצרים יותר. ניתן להסביר זאת בכך שזמן מחזור קצר מפצה על זמני ההמתנה של הולכי הרגל בצמתים ולכן נמצא יעיל לצורך הפחתת העיכובים עבורם. כפי שהוסבר בסעיף 3.1 חצייה רציפה דורשת זמני ירוק מזעריים לתמונות בכיוונים המשניים (Bו-C) ולכן הפער הקיים בין זמני המחזור האופטימליים עם חצייה רציפה וללא חצייה רציפה.
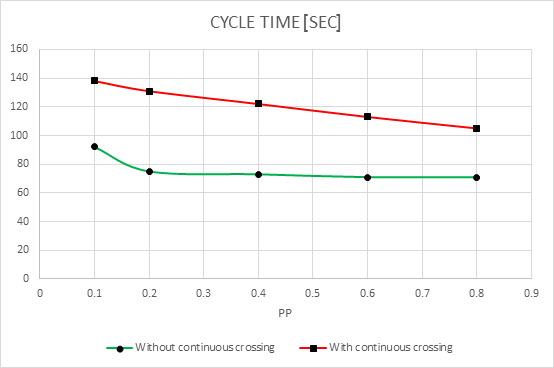
תרשים 2: זמן המחזור האופטימלי כתלות לחלק היחסי של מספר הולכי הרגל מתוך סך משתמשי הדרך בצומת
3.1.2 זמן ירוק מזערי לתמונה A ביחס ל-PP
בתרשים 3 מוצג זמן הירוק המזערי לתמונה A ביחס לפרמטר PP. ניתן לראות כי ללא חצייה רציפה, ככל שערך PP גדל כך קטן ערך הירוק המזערי האופטימלי לתמונה A. ניתן להסביר זאת בכך שככל שזמן הירוק המזערי יהיה קטן יותר, כך הגמישות התפעולית בצומת תאפשר מעבר לתמונות Bו-C עבור התנועות המשניות וכן תנועות הולכי הרגל החוצות את הצומת, ובכך להקל על זמני העיכוב הנוצרים בדרך עבור הולכי הרגל. עבור חצייה רציפה לא ניתן להסיק מסקנות מיוחדות בשל אקראיות של התוצאות.
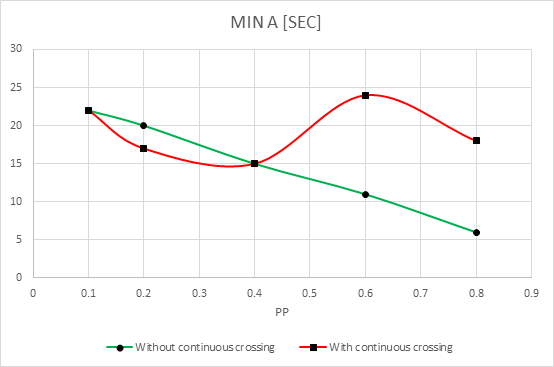
תרשים 3: זמן הירוק המזערי לתמונה Aכתלות לחלק היחסי של מספר הולכי הרגל מתוך סך משתמשי הדרך בצומת
3.1.3 זמן ירוק מרבי לתמונה A ביחס ל-PP
בתרשים 4 מוצג זמן הירוק המרבי לתמונה Aביחס לפרמטר PP. מן התוצאות ניתן להסיק מסקנות דומות לסעיף מעל. כלומר קיצור תמונה A מתקשר לגמישות תפעולית בצומת.
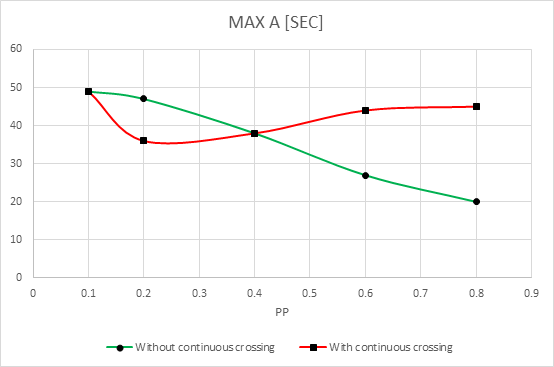
תרשים 4: זמן הירוק המרבי לתמונה A כתלות לחלק היחסי של מספר הולכי הרגל מתוך סך משתמשי הדרך בצומת
3.1.4 זמן ירוק מזעריים לתמונות המשניות ביחס ל-PP
בתרשימים תרשים 5 ו-תרשים 6 מוצגים זמני ירוק מזעריים לתמונות עבור התנועות המשניות (תמונות Bו-C) . ניתן לראות כי פרמטר PPלא משפיע באופן משמעותי על קביעת הפרמטר הזה. זמני הירוק המזעריים נקבעו עבור החצייה הרציפה כך שיתאפשר חצייה של הולכי הרגל מצד לצד של הצומת ולכן זמני הירוק המזערי עבורם ארוכים יותר.
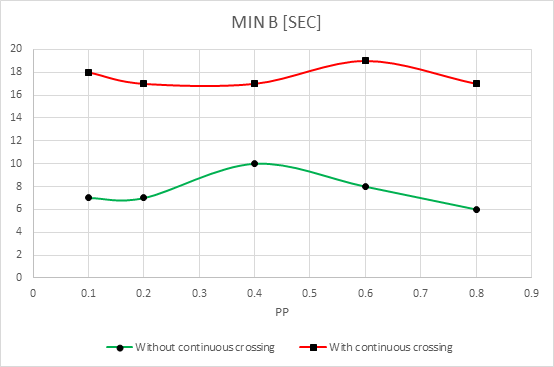
תרשים 5: זמן הירוק המזערי לתמונה B כתלות לחלק היחסי של מספר הולכי הרגל מתוך סך משתמשי הדרך בצומת
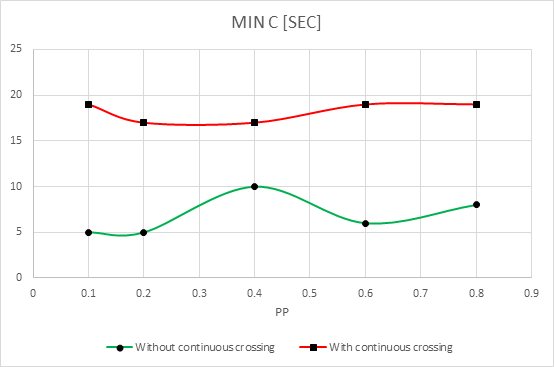
תרשים 6: זמן הירוק המזערי לתמונה C כתלות לחלק היחסי של מספר הולכי הרגל מתוך סך משתמשי הדרך בצומת
3.2 ממצאים, סיכום ומסקנות
-
נמצא כי חצייה רציפה היא פרמטר שאינו מפחית בהכרח את העיכובים בצומת עבור משתמשי הדרך. יתרונה העיקרי של החצייה הרציפה היא בנושא הבטיחותי, מניעת עיכובים של הולכי רגל במפרדה ושיפור הענות (compliance) הולכי הרגל למתן אדום בצומת.
- נמצא כי הפחתה של זמן המחזור מועילה בדרך המיטבית להפחתת זמני העיכוב של הולכי הרגל כאשר ישנה בצומת ביקושים גדולים לחצייה של הולכי רגל ביחס לשאר משתמשי הדרך (בעיקר במרכזי הערים).
- נמצא כי קיצור הפרמטר של זמן ירוק מרבי וכן של זמן ירוק מזערי בתמונה הראשית מתקשר לגמישות תפעולית הדרושה לצורך הפעול יעיל של הצומת המרומזר וצמצום העיכובים להולכי הרגל ככל שערך PP גדל.
- שיעור הולכי הרגל בצומת משפיע רבות על אופן תפקוד הצומת, לכן בתכנון צומת מרומזר יש לבצע ספירות הולכי הרגל בצומת ולא רק נתונים הקשורים לזרימת התנועה של כלי המנועיים (פרטיים ותצ"מ). הדבר נכון בעיקר במרכזי העיר בהם פרמטר PP הינו גבוה יחסית.
- נמצא כי MESCOP (Balasha & Toledo) 2015 הינו כלי יעיל ומהיר לבחירת פרמטרים הדרושים לצורך תפקוד יעיל של צומת מרומזר.
4. סיכום ומחקר עתידי
קיימות אפשרויות רבות לצורכי מחקר עתידי וביניהם:
- שימוש במודל סימולציה מיקרוסקופי על מנת לבחון את זמני העיכובים של הולכי הרגל כאשר מתייחסים גם למסלולי התנועה המלאים שלהם.
- בחינה השוואתית בין לוגיקות תפעול רמזור על מנת למצוא את היעילה ביותר לכלל משתמשי הדרך.
- בחינה כלכלית של יעילות החצייה הרציפה כאשר מתייחסים לתועלות הבטיחותיות ביחס לנושא התנועתי.
- בחינת יחסי הגומלין בין משתמשי אופניים לשאר משתמשי הדרך וההשפעה על העיכובים.
- בחינה ע"י ניסוי שטח.







אין תגובות